
Marina de guerra



| QR código: |
|
Descargar
en formato pdf
en formato pdf
cuota
Productos similares




Zarya-ME
Surface ship sonar system
The Zarya-ME surface ship sonar system is designed for undersea and surface targets detection to enable underwater weapon application and navigation security.
Missions:
- submarines and surface ships detection in hydrolocation mode by hall-mounted, towed and dipping antenna arrays;
- detection of torpedoes, submarines and surface ships in the listening mode by hall-mounted, towed and dipping antenna arrays;
- automatic target tracking, localization and motion parameters determination, and targeting to underwater weapons;
- objects classification into submarine, surface ship, torpedo and decoy classes;
- torpedoes detection in the active mode;
- hydroacoustic communications with submarines and surface ships, and identification "friend-or-foe";
- monitoring of sonar background noise;
- continuous automatic system’s functional testing and location.
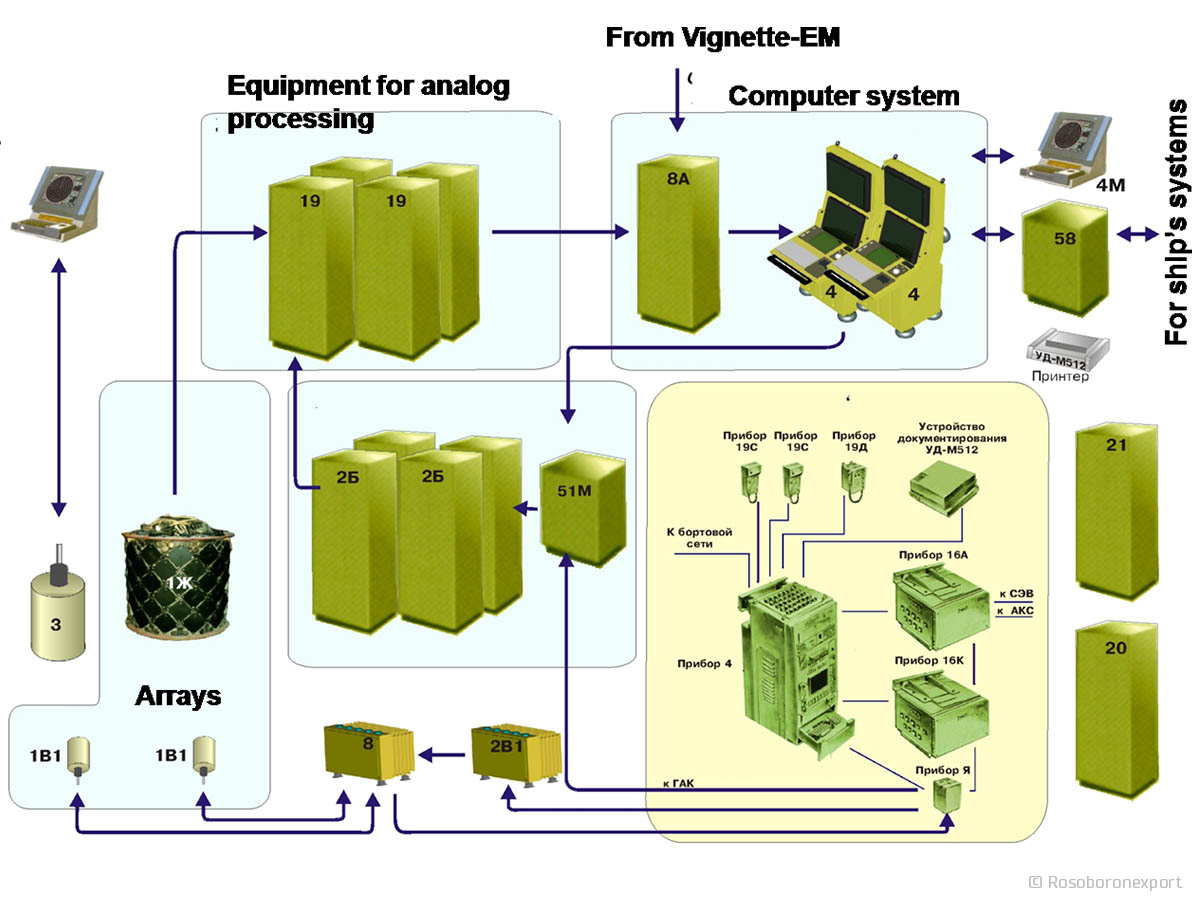
Zarya-ME family sonars share a typical structure, differing only in array dimensions and number of hardware components on a particular ship project. Such unification is obtained thanks to the use of multiprocessor computers, standard color displays, as well as sonar management assets.
Zarya-ME sonar modifications are installed on ships of small, medium and large displacement.
Principales características
Hall-mounted array
Energy-linked detection range (directed emission mode, 10-m equivalent radius target), km
up to 35
Range scales (depending on the modification), km
2,5; 5; 10; 20; 40; 80; 160
Median coordinate-measuring error:
range, % of scale
1,1
bearing, deg
0,7-1,2
Electronic stabilisation angle limits of array pitching (for a range of 160 km), deg
± 10
Hydrolocation scan sector, deg:
directional emission (in 30/60-deg sector)
from ±135 to ±150
non-directional emission
from ±135 to ±150
Towed array
Energy-linked detection range (directed emission mode, 10-m equivalent radius target), km
14-15
Median coordinate-measuring error:
range, % of scale
1,1
bearing, deg
1,3
Hydrolocation scan sector, deg:
directional emission (in 30/60-deg sector)
±160
non-directional emission
±160
Max tow speed, knots
18
Dipping array
Energy-linked detection range (directed emission mode, 10-m equivalent radius target), km
16
Median coordinate-measuring error:
range, % of scale
1,1
bearing, deg
1,3
Hydrolocation scan sector, deg:
directional emission (in 30/60-deg sector)
±180
non-directional emission
±180
| QR código: |
|
Descargar
en formato pdf
en formato pdf
cuota
Photogallery
Productos similares


© 2024 «Rosoboronexport»
Unirse
![]()

![]()
![]()
![]()
![]()